
Colloque d’Autun
Ma présentation sur le sujet “Geste martial et propriétés mécaniques des armes blanches” au colloque FFAMHE d’Autun en 2022.
Ma présentation sur le sujet “Geste martial et propriétés mécaniques des armes blanches” au colloque FFAMHE d’Autun en 2022.

This post provides an in-depth analysis of a cutting motion, giving details about the trajectory of the sword and the power generation mechanisms involved.
This article is an attempt at the physical modellisation of weapon impact – blunt, cutting or thrusting. It explores how damage, represented as depth of penetration, depends on various properties of the target and weapon, and how difficult it can be to predict damage.

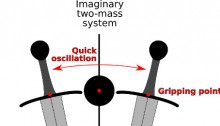
The mass distribution of swords is a well-known component of their performance and handling feel. Although sword makers have to control it through a variety of means, from a user perspective, only three parameters are needed to completely describe it: total mass, centre of gravity, and radius of gyration. They are well known of physicists. However, their values are not in direct relation with what we perceive when using a sword. Because of this, their usefulness has been questioned and their measurement in the sword community is still scarce. In this article, I will demonstrate how to build a more visual representation of the mass distribution of swords, with an application on five swords of my collection.
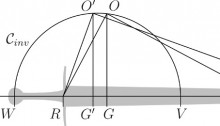
Here is a link to another article describing how geometric methods can be used to represent and analyze the mass distribution of swords and other weapons.
Here is a link to my article about weighing swords. Learn a practical way to measure the mass distribution of swords, or at least the aspects of it that have a significant effect on handling properties.